Estimate for the true area of contact
Consider the deformation of a single spherical asperity, of radius r, pressed against a plane surface under a load w:
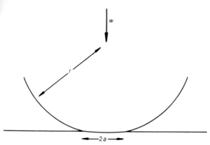
The radius of contact is a. The area of contact, πa2, is A. For purely elastic deformation under conditions of plane strain
\[A = \pi {a^2} = \pi {\rm{ }}{\left( {\frac{{3wr}}{{4E}}} \right)^{2/3}}\] where \[\frac{1}{E} = \frac{{1 - \nu _{{\rm{sphere}}}^2}}{{{E_{{\rm{sphere}}}}}} + \frac{{1 - \nu _{{\rm{surface}}}^2}}{{{E_{{\rm{surface}}}}}}\] and r is the asperity radius
Note that for either the sphere or the material it is indenting, \(E/(1 - {\nu ^2})\) is the Young’s modulus in plane strain.
For perfect plastic deformation (e.g., when the asperity has yielded),
\[A \propto w\]
which is the same as in hardness testing.
Multiple asperity contact:
Extending the principles found in single asperity contacts to multiple asperities requires a statistical theory of multiple asperity contact by two rough surfaces.
It has been found that
\[A \propto {w^{1 - \delta }}\]
with δ << 1, even for elastic contact. Hence, to a very good approximation, the ratio w/A is almost constant.
From models it has also been able to deduce whether asperities make contact elastically or plastically. The asperity deformation mode is found to be dependent on the value of a plasticity factor, y:
\[\psi = \frac{E}{H}{\left( {\frac{{\sigma *}}{r}} \right)^{1/2}}\]
where E is the Young’s modulus, H is hardness, σ* is the standard deviation of the distribution of asperity heights and r is the asperity radius (assumed in this model for y to be the same for all the asperities).
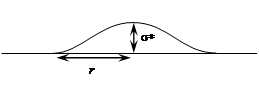
\(\frac{{\sigma *}}{r}\) \(\approx {\rm{ }}\)mean asperity slope
The dependence of asperity deformation mode with \(\psi \) for aluminium with different surface roughness values is shown below.
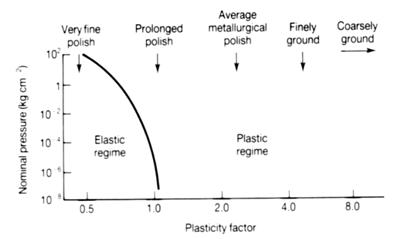
For:
\(\psi \le {\rm{ 0}}{\rm{.6}}\) the behaviour is almost perfectly totally elastic
\(\psi \ge {\rm{ 1}}\) the behaviour is almost perfectly totally plastic
It will only be for very fine polishing (small \(\frac{{\sigma *}}{r}{\rm{ }}\)) that asperity contact between aluminium surfaces will remain elastic. For ‘average’ metallurgical polishes plastic deformation will arise at asperity contacts.
However, for polymers and ceramics,
\[\frac{E}{H} \approx {\rm{ 0}}{\rm{.1 }}{\left( {\frac{E}{H}} \right)_{{\rm{metals}}}}\]
and this leads to a greater likelihood of elastic contact between asperities. This is why wear of ceramics tends to be dominated by brittle fracture of surface material.
The important result from this is that for most surfaces, i.e., for a given σ*, r and surface density of asperities, the deformation mode (elastic or plastic) cannot be altered by changes in the load.